Hello everybody.
I have some doubts regarding the functioning of the reliability analysis module for my particular problem. Here are the details.
I am using the reliability analysis of UQlab on a model with input space dimension 2. I decided to compare the AKMCS method with the MC method. This one will be considered as a benchmark for the problem.
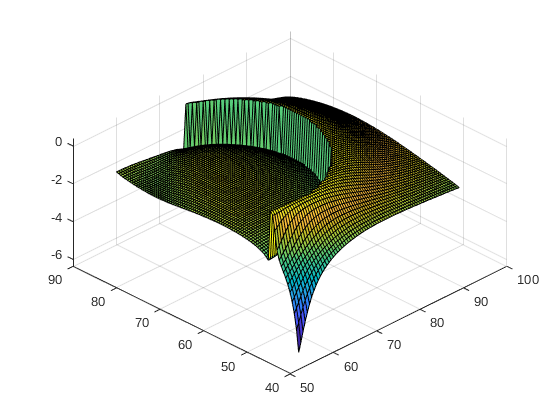
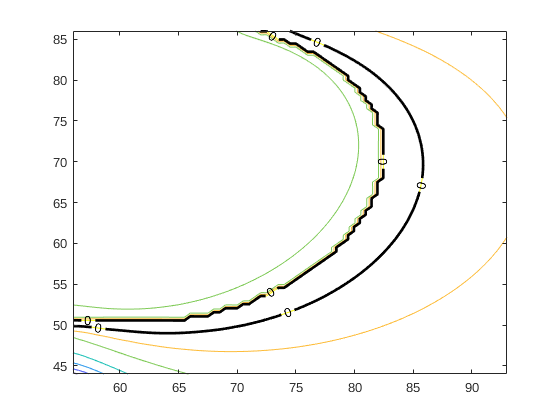
I set the MC module with the comparison operator, I set the model, and I start the module simulation. The simulation stops with 10^5 runs, and I get my benchmark simulation. The areas of safe and fail are easily visible if I type the “uq_display” command.
Then, I set the AKMCS with Kriging metamodel in the following way: I choose the correlation family, the comparison operator for the limit state function, indicate the initial input experimental design, set the max added ED at 500 and set the convergence function with StopU (I also tried with StopPf).
The AKMCS with PCK metamodel has been set with the same properties. I run both of them, but I am not satisfied with the results I get. Here, they are listed:
-
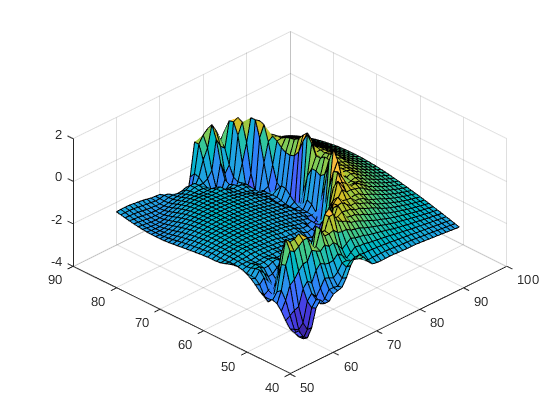
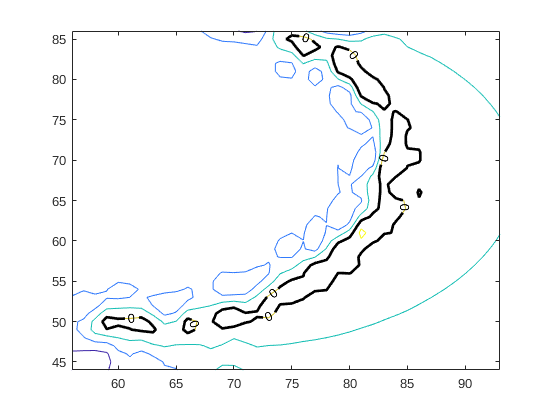
I do not get the convergence for both method AKMCS. They reach the 500th simulation without converging (for both methods and convergence functions). When I display my reliability analysis, I can see that the module has found most of the limit state function, but the confidence interval of the probability of failure is far away to converge;
-
the simulation time of both AKMCS is 10^1 or 10^2 times bigger than the MC one. This problem is the main problem of my simulation because it should result in a less computational effort, but it is not the case if I look at the simulation time.
I think, and I am afraid that the main issue is that my model is “too easy” for this application and therefore, AKMCS makes just everything more complicated. My model is deterministic.
In case there are some details missing, I would provide you with more information.
Thank you in advance for any help
Best,
Gian Marco