Hello Dear UQ-Team / UQ -user
I am a structural engineer (in my Masters) an have the following question/problem:
I programmed a Matlab-Algorithm to solve static systems (undetermined) with the Stiffness-Method (“Deformationsmethode”). So I have an algorithm which is solved by linear algebra.
Now I thought, that it would be nice to implement some uncertainties (Forces and Young Modulus for instance) and connect it with UQLab (For Multi Storey Frames, etc.),
So my Limit State Function is actually a limited deformation at the top of the building.
The Problem now is the array of the matrices. So when I want to do FORM, Monte Carlo or AK-MCS, of course the dimensions of the matrix does not agree. In a first step I would like to do a FORM an SORM analysis and then for more complex systems use the PCE.
This Pseudo Code is used:
Function g= lsf(X)
% X is a vector containing all your model parameters. The size should be the same as the myInput object that you will create to define input distributions.
% pass X to your FE code
Here you should pass the values in X to the various arrays/ matrices you need for your FE analysis, ie forces in F, Young’s moduli in the local stiffness matrices etc.
% run you FE analysis with current values of X
Here you solve for the displacement vector U= K\F
% retrieve the relevant displacement
utop = U( put here the right index depending on your node/ DOF numbering );
% compute g
g= your_threshold - utop;
The main question is how to pass the vector X to my FE Code ( with X(:,1) it doesn’t work because of the dimensions of the matrices). How do I have to pass these values to my code?
Here is a part of my code or better, of my Limit State function:
function Y = DefMet_USP(X)
%%Lösungsalgorithmus Deformationsmethode
%% E-Moduli und Kräfte
Aa = 0.003; % m^2
Ja = 2*10^-4; %m^4
Jb = 2*10^-4;
Ab = 0.003;
Ac = 0.003;
Ad = 0.003;
Ae = 0.003;
P2 = X(1); --> Here is the problem
E = X(2); --> Here is the problem
EAa = 100000000000;
EJa = E*Ja;
EJb = E*Jb;
EAb = 100000000000;
EAc = E*Ac;
EAd = E*Ad;
EAe = E*Ae;
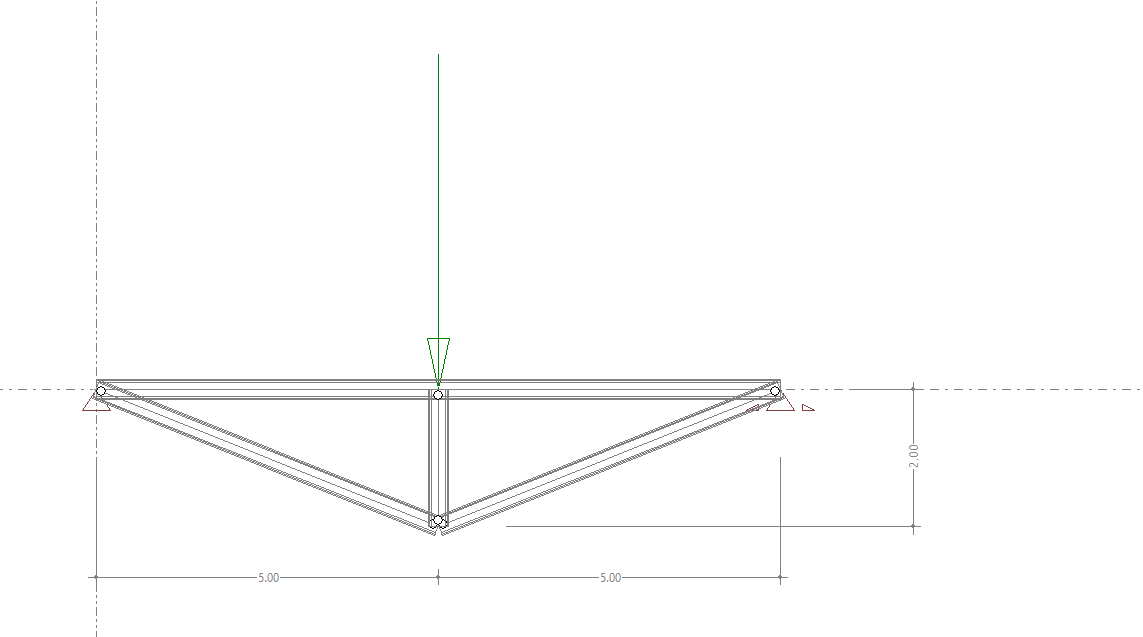
%% Geometrie definieren [m]
La = 5;
Lb = 5;
Lc = sqrt(5^2+2^2);
Ld = 2;
Le = sqrt(5^2+2^2);
%% Lösungsalgorithmus
%Kinematische Matrix definieren
Af=[1 0 0 0 0 0;
0 -1/Lb 1 0 0 0;
-1 0 0 1 0 0;
0 1/Lb 1 0 0 0;
0 0 0 0 -Ld/(sqrt(5^2+2^2)) La/(sqrt(5^2+2^2));
0 1 0 0 -1 0;
0 0 0 La/(sqrt(5^2+2^2)) -Ld/(sqrt(5^2+2^2)) -La/(sqrt(5^2+2^2))];
%Stabsteifigkeitsmatrix erstellen
K=zeros(7,7);
K(1,1)= EAa/La;
K(2,2)= 3*EJa/La;
K(3,3)= EAb/Lb;
K(4,4)= 3*EJb/Lb;
K(5,5)= EAc/Lc;
K(6,6)= EAd/Ld;
K(7,7)= EAe/Le;
%Knotenlasten
Pf = [0 -P2 0 0 0 0]';
Pwf = [0 0 0 0 0 0]';
%Stabeinspannmomente Q definieren
Q0 = [0; 0; 0; 0; 0; 0; 0;];
%Globale Steifigkeitsmatrix
Ks = Af'*K*Af;
%Lösen Gleichungssystem
Knotenverschiebungen
Uf = Ks^(-1)*(Pf-Pwf-Af'*Q0);
%Berechnung Stabverformungen
V=Af*Uf;
%Berechnung Stabkräfte
Q=K*V+Q0;
%% Limit State Function (Durchbiegungsbegrenzung)
Y = (La+Lb)/300+Uf(2);
end
Thank you really much for your answers, it would be really cool if I had a solution to this problem, before I start using UQ Link with other FE-Programs.
Best regards
Timon