I have some question about arbitrary polynomial chaos expansion.
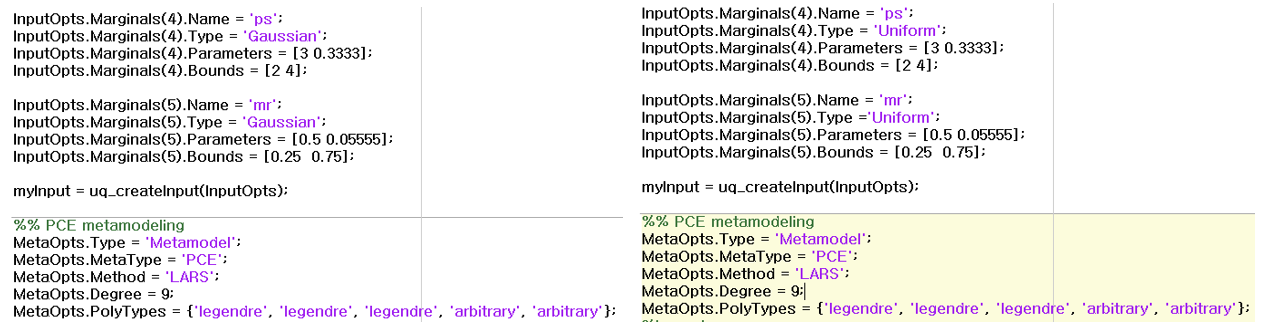
Unlike gPC, aPC knows that unlike gPC, it does not assume input distribution, and uses only data to create a PCE model with the basis as the stielgjes procudure. So, in my opinion, we only need to declare the lower bound and upper bound of the variable. In UQLAB, we must specify the input distribution as shown in (a) in the figure. Is this just a process for constructing a model in uqlab? For example, what is the physically difference between (b) (with a uniform distribution) and (a) ?
I think that the Stieltjes procedure to construct an orthonormal polynomial, need a well-defined probability measure (that usually has a pdf) with respect to which compute the orthonormal polynomials. Consequently, assigning to UQLAB an initial distribution is compulsory. What you can do, for example, is to define the input as type = ‘ks’ so a Kernel pdf fit is done considering the input data. For more information about the input, see the Input user manual.